


Active Vibration Suppression
Cost-optimized mechatronic designs and faster machine speeds are resulting in more and more drive systems being pushed to their limits. This also brings with it an increased vibration tendency, however. In order to achieve high performance when operating these systems, i.e. agile trajectories and highly effective suppression of disturbances, an improved control strategy is required. This is now possible using new integrated firmware functionality in the ACOPOS drive system.
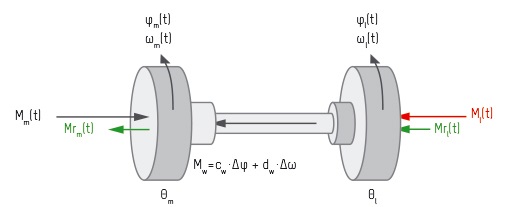
A vibrating drive system refers to drive mechanics that tend to vibrate as a result of low torsional stiffness or large mass moment of inertia mismatches with a standard drive. They can therefore only be operated with reduced performance. This type of drive behavior can be represented by a single two-mass vibrational system where both masses are connected with a shaft and two parameters for stiffness and damping. Important for the speed control loop, the transfer ratio of motor torque to motor speed can be successfully approximated in many cases.
Due to the non-rigid connection, relative movements can occur between the masses during highly dynamic operation or load disturbances (i.e. load torque that affects the second mass). These relative movements are a problem for a standard control loop with only one motor encoder for determining position and speed.
Controlled drive behavior can be considerably improved by using a second encoder to determine the load position and load speed. This brings with it certain disadvantages, however, such as the necessity of an additional encoder, which increases costs, and the installation of a load encoders, which is often only possible with a great deal of work.
The structural design of classic power transmission systems for machine manufacturing is very often a 2-mass vibrational system. Increasing machine clock rates result in the tendency of constructions to vibrate. Vibrations are actively suppressed using a firmware function that is integrated in ACOPOS drive systems.
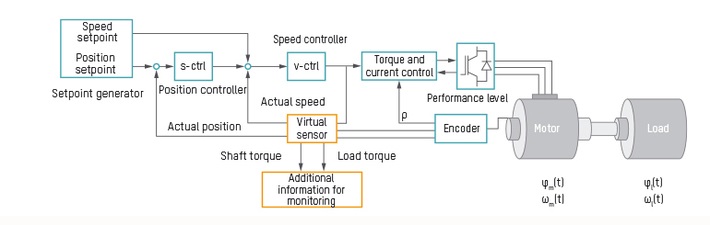
Virtual encoder in the ACOPOS drive system enables vibration suppression
In order to avoid the disadvantages of 2 encoder control, it is possible to apply the principle of virtual sensors. A virtual sensor refers to the mathematical calculation of difficult-to-measure system values from those that are easy to measure. This relies on a mathematical model of the drive system. Easily measurable system values include motor speed and motor position. Motor torque can also be considered known as long as the torque control loop works with sufficient precision and dynamics. This makes it possible to represent the drive dynamics of a virtual sensor with the aid of a two-mass vibrational system. The virtual sensor is used in such a way that its outputs are mixed values calculated from both the motor speed and load speed as well as the motor position and load position. These mixed values are then used as actual values by the position or speed controller. The mathematical model of the drive system mapped in the virtual sensor makes it possible to monitor shaft and load torque. Both are therefore included as additional information for analysis. Optimized machine cycles: The benefit of active disturbance suppression is the considerably shortened settling time as well as a strongly suppressed vibration tendency when vibration suppression is turned on and active. Improved control reduces the lag error and the resulting short settling time allows optimized machine cycles.
Virtual sensors increase the process reliability without additional hardware costs. The use of virtual sensors is possible even in complex applications with adapted controller cascading.
Optimized machine cycles
The benefit of active disturbance suppression is the considerably shortened settling time as well as a strongly suppressed vibration tendency when vibration suppression is turned on and active. Improved control reduces the lag error and the resulting short settling time allows optimized machine cycles.
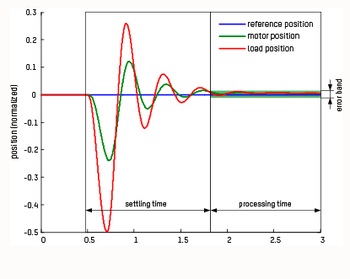 | 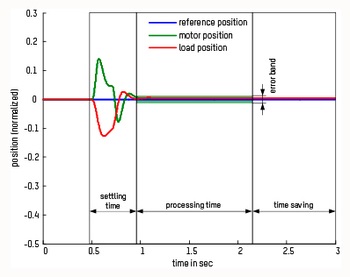 |
| Disturbance suppression without active vibration suppression (disturbance pulse at time t = 0.5 s) | Disturbance suppression with active vibration suppression (disturbance pulse at time t = 0.5 s) |